











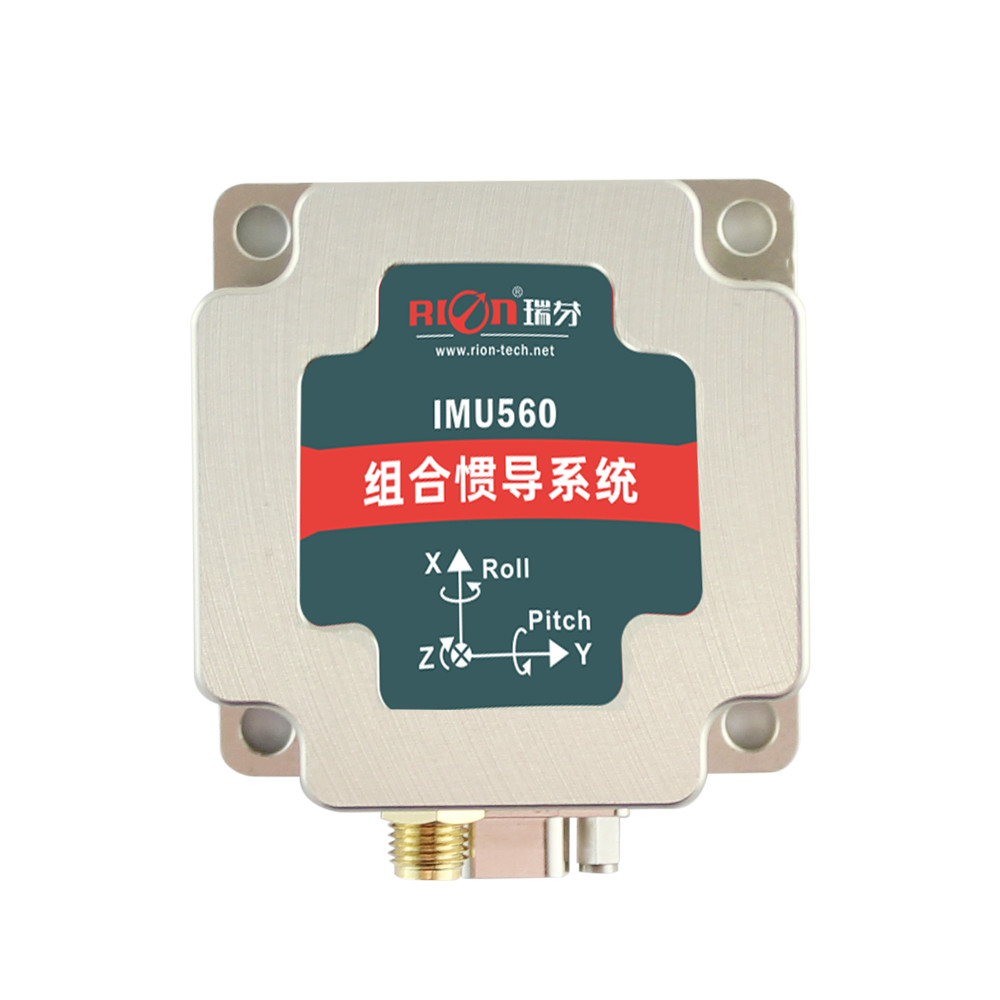



According to the rotation order of Z-Y-X, when the positive direction of the X-axis is directed to the front of the carrier, the angle of rotation around the Z-axis is the heading angle, the angle of rotation around the Y-axis is the pitch angle, and the angle of rotation around the X-axis is the roll angle. .
